
Idag, äntligen fick jag publicerat mitt programtillägg till plotterprogrammet OpenCPN.
OpenCPN är en s.k. öppen programvara liksom det mer kända linux operativsystemet vilket betyder att det inte är ett företag som äger programvaran utan den utvecklas av privatpersoner som tillsammans bidrar i utvecklingen och vem som helst kan vara med i processen. Antingen genom att skriva program, testa eller komma med synpunkter och förbättringsförslag.
OpenCPN är som jag skrivit ett plotterprogram där man kan se sin båt och hur den rör sig på ett elektroniskt sjökort. Detta visas på en bildskärm. Ofta har man små skärmar, 7 till 10 tum eller så. Vi har en riktig datorskärm 19″ som ju samtidigt är skärm till vår fasta dator ombord.
När vi köpte radarantennen undersökte jag om den skulle fungera ihop med OpenCPN. Där fanns ett programtillägg till en radar från samma företag som vår men vår var av en nyare modell jämfört med vad som redan definitivt fungerade. Jag ställde då frågan om även denna nyare modell skulle fungera och fick ett jakande svar. Detta visade sig senare inte vara sant utan vår radar var inte alls kompatibel med det befintliga programvarutillägget.
Vad gör man då ? Jo man tar sig an den intrikata uppgiften att reda ut hur vår radar fungerar och skriva om den redan befintliga för att passa vår radar.
Sagt och gjort. Nja, inte riktigt så enkelt. Informationen som behövdes för detta är inte öppet tillgänglig varför man är tvungen att utföra en s.k. reversed engineering. Ett ganska gediget arbete. Nu efter 1 1/2 år ungefär har jag lyckats få till en plugin som jag med gott samvete kan överlämna till gänget på OpenCPN.
Här är en bild på hur det ser ut där vi ligger i Porto Santo.
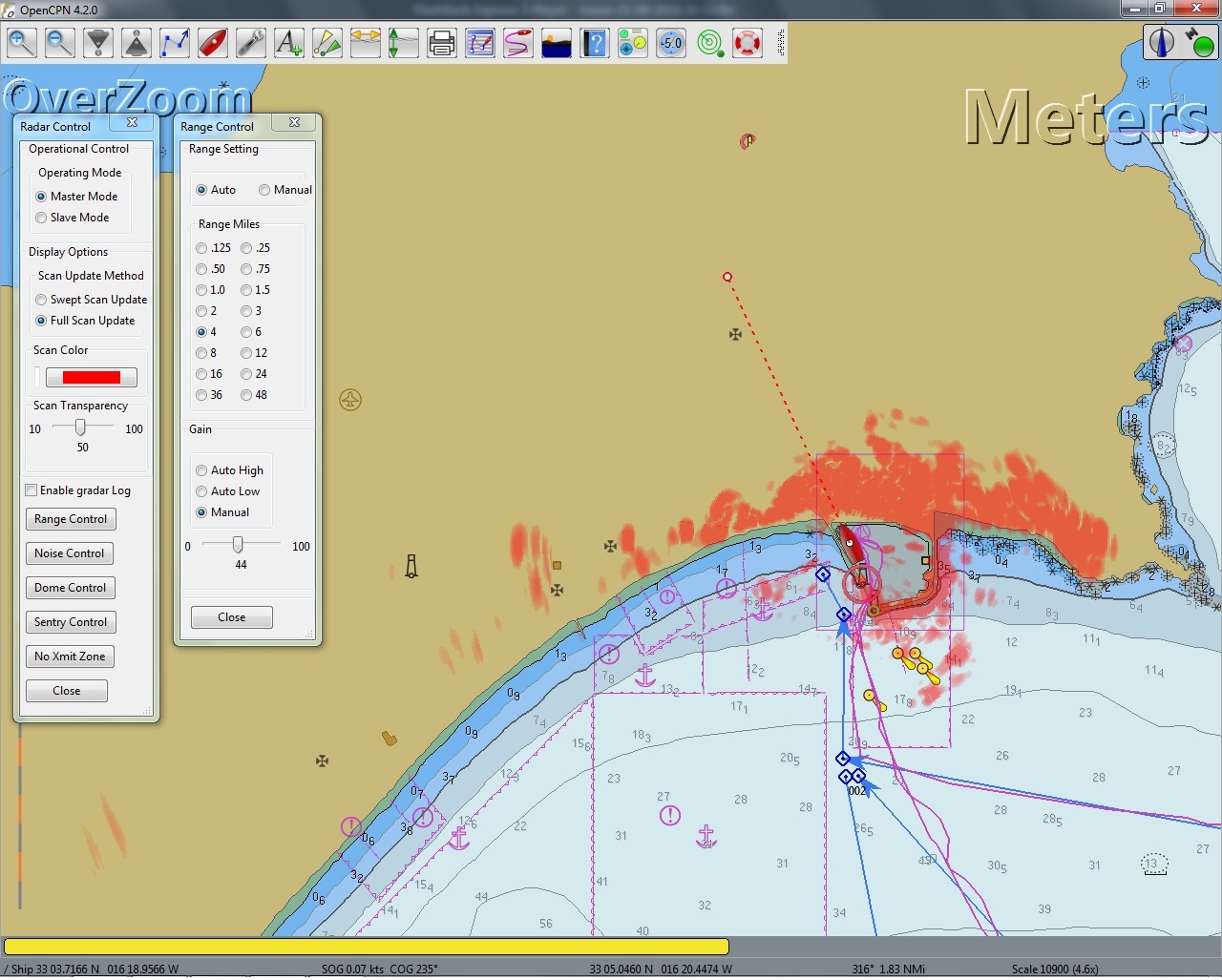
Min nya plugin i aktion.
Här nedan har jag spelat in en film som visar hur det kan se ut när man använder radarn i OpenCPN.
Snyggt jobbat Hasse!!
Jag är också OpenCpn freak men har tyvärr en gammal analog Raymarine-radar. Så jag får nog inte nytta av radaroverlayen förrän jag investerar i ny radar.
Något jag saknar i OpenCpn men som borde finnas någonstans är vind och strömpilar baserat på instrumentdata.
Du menar true wind speed and direction. I princip samma sak för strömmen.
Visst, det är säkert en baggis om man har kompasskurs, boat speed, vindriktning, vindhastighet, COG och SOG, och det har man ju. Det finns ju nu också en WMM (World Magnetic Model) i OpenCPN. Med denna information och lite vektorberäkningar så löser man det. Detta borde finnas med i dashboard_pi. Jag ska ta upp frågan. Vem vet, jag kanske fixar detta själv. Jag var faktiskt på gång med detta men lite annat kom emellan. 🙂